 Heute gibt’s mal ein paar Worte zu meiner Arbeit hier. Eigentlich ist das ja noch geheim, aber der Robocup steht so dicht vor der Tür, dass wohl kein anderes Team jetzt noch auf die Idee kommen würde, das zu implementieren . . .
Heute gibt’s mal ein paar Worte zu meiner Arbeit hier. Eigentlich ist das ja noch geheim, aber der Robocup steht so dicht vor der Tür, dass wohl kein anderes Team jetzt noch auf die Idee kommen würde, das zu implementieren . . .
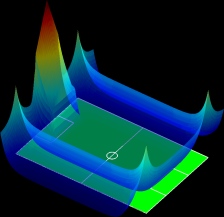
Auf dem Bild ist eine graphische Darstellung des Potentialfelds zu sehen, welches in den Robotern für ihre Positionierung verwendet wird. Diese versuchen im Prinzip immer den steilsten Gradienten entlang („bergab“) zu laufen. Nicht zu sehen sind Spielball (der eine tiefe Senke kreieren würde, um den Roboter anzuziehen) oder andere Spieler (die kleine Hügel hervorrufen, damit sich die Jungs z.B. nicht alle auf einmal auf den Ball stürzen).
In den letzten Tagen habe ich mich mit den Seitenlinien (fast trivial) und dem eigenen Strafraum (weniger trivial…) beschäftig. Die Roboter bekommen nämlich eine 30 Sekunden Strafe, wenn sie entweder das Feld verlassen oder den eigenen Strafraum betreten.
Ja, äh, genau: Gradienten im Potentialfeld… dachte ich mir schon *hust*.
Na dann: weiterhin viel Erfolg beim kicken!
:-)
Grüße,
markus